Intensive Fieldbus Diagnostic erhöht Maschinenverfügbarkeit
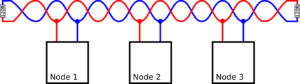
Bild 1: CAN-Bus Prinzipieller Aufbau
Mobile Maschinen werden immer komplexer. Aktuelle technische Entwicklungen haben als Ziel eine möglichst autonom arbeitende Maschine. Das Datenaufkommen innerhalb derart komplexer Maschinen steigt ständig an, ebenso die Erwartungen an die Verfügbarkeit der Maschine. Das Rückgrat der Datenkommunikation ist in den meisten mobilen Arbeitsmaschinen der CAN-Bus oder ein darauf aufsetzendes Bussystem wie SAE J1939, ISOBUS oder NMEA2000. Diese Feldbusse werden teilweise an ihrer Übertragungsgrenze betrieben, Auslastungen von 80 % und mehr sind inzwischen nicht mehr selten. Das kann zu Problemen führen, wenn äußere Einflüsse wie elektromagnetische Störungen Übertragungsfehler auslösen. Durch eine Erhöhung der Störsicherheit können Ausfälle der Kommunikation verhindert werden.
Prinzipieller Aufbau des CAN-Bus
Der CAN-Bus (Bild 1) hat im Gegensatz zu anderen Bussystemen eine eingebaute Fehlerkorrektur, die automatisch Nachrichten wiederholt, falls Fehler festgestellt werden. Das sogenannte Error-Frame signalisiert den Teilnehmern in einem Segment, dass die letzte Nachricht von mindestens einem Teilnehmer als ungültig angesehen wurde. Das Fehlermanagement des CAN sorgt in diesem Fall dafür, dass diese Nachricht von allen Teilnehmern verworfen und wiederholt gesendet wird, bis die Übertragung von allen Teilnehmern verstanden wurde. Diese Wiederholung der Nachrichten hat Einfluss auf die Buslast, die im Fehlerfall stark ansteigen kann, da die Nachrichten schnell hintereinander wiederholt werden. Ist die Grundlast schon sehr hoch, kann das wiederum dazu führen, dass niederpriore Nachrichten nicht mehr im erforderlichen Zeitrahmen übermittelt werden können. Die Folge sind Unsicherheiten in der Daten-
lage und im Weiteren Unsicherheit über den Maschinenzustand.

Bild 2: Error-Frame mit anschließender Telegrammwiederholung
Der Mechanismus der Error-Frames (Bild 2) ermöglicht eine hohe Datensicherheit im CAN-Bus, ohne aufwändiges Error-Handling in den oberen OSI-Schichten. Für den Anlagenbetreiber sind Error-Frames ein sicheres Zeichen, dass Übertragungen nicht erfolgreich und Unzulänglichkeiten vorhanden sind.

Bild 3: CANtouch Messung: sehr
hohe Buslast
Buslast begrenzen
Ein Ziel im Design und der Entwicklung mobiler Arbeitsmaschinen muss sein, die Last auf dem zentralen CAN-Bus-System gering zu halten. Dadurch bleibt im Fehlerfall genug Zeit, um Telegramme zu wiederholen. Leider werden in vielen Anlagen Mengen von Daten übertragen, ohne vorher die Auswirkungen auf die Buslast im Detail zu analysieren. Daten sollten typischerweise dann übertragen werden, wenn eine tatsächliche Notwendigkeit für eine Mitteilung vorliegt. Zum Beispiel könnte ein Temperaturwert anstatt alle 100 ms zyklisch nur alle 10 Sekunden übertragen werden und dazwischen nur dann, wenn er sich drastisch ändert. Manche Mechanismen zur Überwachung von Teilnehmern benötigen mehr Telegramme als andere. So kann auch die Wahl des richtigen Mechanismus die Buslast senken. Im Bussystem CANopen benötigt beispielsweise das Teilnehmer-Überwachungsprotokoll “Node Guarding” jeweils zwei Nachrichten, während das Teilnehmer-Überwachungsprotokoll “Heartbeat” nur eine Nachricht benötigt. Andere Möglichkeiten bestehen in der Wahl intelligenter Sensoren und Aktoren. Zum Beispiel kann man einem Schrittmotor einmal einen Befehl schicken, um 1000 Schritte zu fahren, oder 1000 einzelne Nachrichten, um jeweils einen Schritt zu fahren. In dieser Weise sollte beim Anlagendesign die Notwendigkeit jedes einzelnen CAN-Telegramms auf dem Prüfstand stehen. Damit bewegt man sich bei der Anlagenplanung von der Ebene des Bussystems (OSI 3-7) hinunter auf die Ebene des CAN (OSI Schicht 2). Bild 3 zeigt eine sehr hohe Buslast.

Bild 4: CANalarm
Buslast messen
Die Messung der Buslast ist einfach und lässt sich mit fast jedem CAN2USB-Interface näherungsweise darstellen. Hardwarebausteine wie der CANalarm (Bild 4) der GEMAC ermöglichen u. a. eine selbstständige Überwachung der Buslast und evtl. auftretender Error-Frames ohne die Notwendigkeit eines PCs.
Busphysik
Die gedankliche Bewegung sollte von OSI-Schicht 2 noch einen Schritt tiefer gehen, hinunter auf die Ebene der Busphysik (OSI Schicht 1). Dort entscheidet sich, wie störsicher ein CAN-Bus ist. Wenn die Datenübertragung durch einen äußeren Einfluss gar nicht erst gestört werden kann, kommt es auch nicht zu Error-Frames und Telegrammwiederholungen. Dem Problem wird auf diese Weise ursächlich begegnet. Wenn die Topologie es zulässt, kann die Datenrate erhöht werden. Eine reine Linienstruktur der Segmente ist ideal, Stichleitungen sollten nach Möglichkeit vermieden werden oder so kurz wie möglich sein. In der Regel wird eine Verdoppelung der Datenrate vorgenommen, die grundlegende Buslast wird dadurch halbiert. Alle Teilnehmer in einem Segment müssen auf die neue Bitrate eingestellt werden. Die Kehrseite der Medaille ist: durch die Verdoppelung der Frequenz verschärfen sich in der Regel die Unzulänglichkeiten des Aufbaus, wodurch die Signalqualität absinkt. Abhilfe schaffen hier nur vergleichende Messungen, die vor und nach einer Maßnahme durchgeführt werden und damit eine Beurteilung der Maßnahme ermöglichen. So kann zum Beispiel die Wahl eines geeigneten Kabels die gesamte Störsicherheit erheblich verbessern. Indem die relevanten Faktoren Schritt für Schritt verändert werden und die daraus folgende Veränderung der Signalqualität jeweils nachgemessen wird, lassen sich die Signalqualität und die Störsicherheit optimieren.
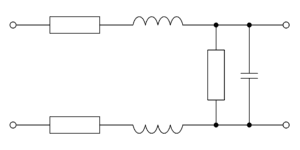
Bild 5: Ersatzschaltbild einer CAN-Leitung
Welche Faktoren haben Einfluss auf die Signalqualität?
Ein CAN-Bus ist nicht nur ein Kabel mit einem Schaltsignal. Die Übertragungsfrequenzen sind hoch genug, dass bereits Effekte auftreten, die nicht mehr mit Gleichspannung und Gleichstrom erklärt werden können. Wie bereits angesprochen, beeinflusst die Topologie die Signalqualität erheblich. Multitap-Ports werden gern verwendet, weil sie die Montage vereinfachen. Aber die dort angeschlossenen Teilnehmer befinden sich nicht mehr in einer Linienstruktur, sondern formen einen Stern. Das verursacht Reflexionen, die sich in die Kurvenform der Signale einprägen. Das Gleiche passiert an Stichleitungen, deswegen ist die kumulative Länge der Stichleitungen in einem Segment klein zu halten. Weiterhin gibt es Einflüsse durch Kapazitäten und Induktivitäten, die vom Kabel und jedem Teilnehmer in die Schaltung eingebracht werden. Mit der Baudrate (und damit der Frequenz) steigt der Einfluss auf die Signalform. Das verschleift die Flanken der Bits und beeinflusst so die Signalqualität. Bild 5 zeigt ein Ersatzschaltbild einer CAN-Leitung.
 Bild 6: CAN-Pegel Bildung des Differenzsignals |
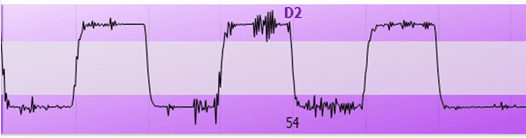 Bild 7: CAN Differenzsignal mit Störung und Reduzierung des Störspannungsabstandes (heller markierter Bereich in der Mitte) |
Geringe Übergangswiderstände
Idealerweise ist man bemüht, die Übergangswiderstände im Bus-System so gering wie möglich zu halten. Jedoch bringen auch Steckverbindungen zusätzliche Widerstände ein, die Signale dämpfen. In der Praxis wurden bereits Steckverbinder mit einem Übergangswiderstand von größer als 1 Ohm gefunden, die in Summe in einem kurzen Segment mehr als 35 Ohm zusätzlichen Widerstand einbrachten. Der entscheidendste Einfluss auf die Signalqualität ist der Störspannungsabstand. Die Datenübertragung im CAN-Bus erfolgt mit einem Differenzsignal. Im Fall der Übermittlung einer logischen Eins muss die Differenzspannung zwischen den Leitungen CAN_L und CAN_H unter 0,5 V liegen. Im Fall der Übermittlung einer logischen Null bei mindestens 0,9 V (siehe Bild 6).
Differenzspannung zur Signalbeurteilung
Normalerweise ergibt sich im CAN-Bus eine Differenzspannung bei der Übermittlung einer logischen Null von ca. 2,0 bis 2,4 V. Störungen auf dem Signal reduzieren diese Spannung. Die Sicherheitsreserve scheint mit der doppelten Spannungshöhe nur auf den ersten Blick groß zu sein. Sie kann sich schnell signifikant verringern, wenn die Störungen entsprechend groß sind. Störquellen sind alle elektrischen Geräte, die in der Nähe des Busses arbeiten oder auch parallel verlegte Leitungen, deren elektromagnetische Signale in die CAN-Leitung eingeprägt werden. Auch die Geräte im CAN-Bus selbst können Störer sein. Externe Störer wie andere Fahrzeuge, eine Hochspannungsleitung, Mobilfunk usw. können ihre elektromagnetischen Aussendungen in den Bus einprägen. Manche CAN-Transceiver (die Baugruppe, die direkt an der CAN-Leitung angeschlossen ist) liefern schaltungsbedingt nur max. ca. 1,8 V Differenzspannung, was die Ausgangslage bereits verschlechtert.
Im Beispielbild (Bild 7) verringert eine vermeintlich kleine externe Störung die Reserve bereits um ca. 60 % (absolut 2,2 V auf 1,45 V). Ist der Störspannungsabstand zu klein, können Bits falsch abgetastet werden. Das führt zu einem Fehler in der Prüfsumme und wird durch das oben beschriebene Error-Frame signalisiert. Es kommt zu einer Telegrammwiederholung.
 Bild 8a: CANtouch: Qualitätswert- |
 Bild 8b: CANtouch: Qualitätswert- |
Wie kann man die Signalqualität bestimmen?
Die vorhandene Signalqualität kann mit Messgeräten bestimmt und überwacht werden. Idealerweise berechnen diese Geräte einen prozentualen Wert, der sich direkt vergleichen lässt. Um eine Aussage treffen zu können, ob ein bestimmter Wert gut oder schlecht ist, braucht man allerdings noch weitere Informationen in Form einer Referenz. Ein Referenzwert lässt sich evtl. von einer Maschine des gleichen Typs gewinnen. Besser ist es, man hat eine Maschinenhistorie zur aktuellen Maschine, die alle aufgenommenen Messwerte enthält - beginnend mit einer protokollierten Endprüfung nach der Herstellung der Maschine bis zu den Messwerten, die in regelmäßigen Abständen im Rahmen von Service-Intervallen ermittelt werden. Dadurch lässt sich zusätzlich zur Fehlerdiagnose eine Aussage über die Alterung des Busses gewinnen.
Die GEMAC bietet mit der Intensive Fieldbus Diagnostic (IFD) Messgeräte, die die Ermittlung relevanter Messdaten so weit vereinfacht, dass innerhalb kürzester Zeit Aussagen über die Signalqualität und viele weitere Parameter möglich sind. Dabei wird nicht auf die Tiefe der Information verzichtet. Die Bilder 8a und b zeigen die Qualitätswert-Messungen einzelner Teilnehmer.
Informationsgewinn durch IFD: Intensive Fieldbus Diagnostic
In der Entwicklung einer neuen Maschine spielt die vergleichende Messung der Busphysik eine entscheidende Rolle. Bereits in dieser Phase kann entschieden werden, ob z. B. eine andere Topologie zu einer Verbesserung der Signalqualität führt oder ob eine Einsparung negative Auswirkungen hat. Durch gezielte Messungen vor und nach einer Veränderung lässt sich so der beste Kompromiss zwischen Aufwand und Nutzen finden. Die Folge einer solchen Vorgehensweise sind stabile CAN-basierte Feldbusse, die auch mit erhöhten Buslasten sicher arbeiten. Sollten Fehler auftreten, ist eine systematische Fehlersuche mit aussagekräftigen Messwerten einfacher und effizienter zu bewältigen. Allein die Aussage, dass der CAN-Bus physikalisch in Ordnung ist, kann stundenlange Fehlersuchen ersparen.
→ Mehr über das CANtouch |
| Autor Ralf Meischner, Technical Support Fieldbus Diagnosis Tools GEMAC Chemnitz GmbH www.gemac-chemnitz.com |

Bild 9: CANtouch
Der Informationsgewinn durch IFD ermöglicht es
• datenbasierte Entscheidungen zu treffen
• stabilere Maschinen zu entwickeln und herzustellen
• Ausfallzeiten zu minimieren
• Fehlersuche und Reparatur zu beschleunigen
• Kosten einzusparen

